

How can autonomous vehicles contribute to sustainable mobility planning?
- Like
- Digg
- Del
- Tumblr
- VKontakte
- Buffer
- Love This
- Odnoklassniki
- Meneame
- Blogger
- Amazon
- Yahoo Mail
- Gmail
- AOL
- Newsvine
- HackerNews
- Evernote
- MySpace
- Mail.ru
- Viadeo
- Line
- Comments
- Yummly
- SMS
- Viber
- Telegram
- Subscribe
- Skype
- Facebook Messenger
- Kakao
- LiveJournal
- Yammer
- Edgar
- Fintel
- Mix
- Instapaper
- Copy Link
Posted: 17 January 2022 | Albert Gragera - Bax & Company, Charlotte van Hek - UITP, Guido Di Pasquale - UITP, Henriette Cornet - UITP, Ignacio Magallón - Bax & Company, Joan Estrada - Bax & Company | No comments yet
SHOW is the flagship pan-European initiative that is piloting autonomous vehicles (AVs) and working to define a tipping point in AV development timelines to make them a reality of tomorrow. Building upon the 13 relevant use cases identified in the former SPACE project, it is focused on concretising the formula for the feasible and efficient integration of AVs in the public transport network, while quantifying their contribution to the objectives of sustainable mobility planning.

Credit: Bax & Company
Cities are focusing on developing a more liveable environment, implementing the visions and goals stated in their Sustainable Urban Mobility Plans (SUMPs), but are struggling to understand the potential impacts of novel mobility solutions combined with policy actions.
In this context, the deployment of autonomous vehicles (AVs) can be either an opportunity or a threat to achieving such goals, depending on the approach defined. The evidence, so far, suggests that the impact of AVs – by either reproducing the privately-owned car, or delivering service schemes competing with established public transport – will lead to a strong increase in vehicle kilometres travelled (VKT). The first scenario would clearly lead to more car traffic, whereas the second may bring better mobility (fewer parked cars, improved access to public transport) but less efficiency overall (smaller vehicles replacing buses, trains and less active mobility).
However, if transport authorities take a proactive role to operate AV fleets cooperatively by integrating with their public transport network and other sustainable solutions, there is a strong opportunity to reach desired outcomes. This third scenario would enhance the public transport network with AVs and shared mobility services of different sizes, potentially enabling the opportunity to transport every citizen to their destination with up to 80 per cent fewer cars1.
As a result, this scenario represents a promising alternative to car ownership: (i) it offers seamless door-to-door mobility (for people and freight) that is both comfortable and convenient through a combination of services; (ii) provides the service at lower operational costs (driverless); (iii) improves energy efficiency and air quality (fewer cars, more fleet electrification); (iv) enhances accessibility to key services for less mobile persons; and (v) improves safety due to fewer human errors (related to 90 per cent of road accidents), contributing to ‘Vision Zero’. Thus resulting in more accessible, healthier, greener, more inclusive and safer cities, as well as in suburban and rural areas.
SPACE: Paving the way for AV deployment
Aiming to coordinate the proactive efforts of different operators and authorities worldwide, in 2018, the International Association of Public Transport (UITP) launched the SPACE project (Shared Personalised Automated Connected vEhicles)2 – a global initiative to contribute to placing public transportation at the centre of the AV revolution and building a combined transport ecosystem.
An important focus of this multi-stakeholder initiative, involving 50 international entities, was on tailoring AVs to different specific realities where they could add value. AVs provide many opportunities for better urban mobility services, but how they can best be integrated depends on the characteristics of the area. Under this premise, the SPACE partners defined the first list of 13 relevant use cases for integrated AVs to be deployed in environments with different densities, targeting different users3, as presented in the table below.
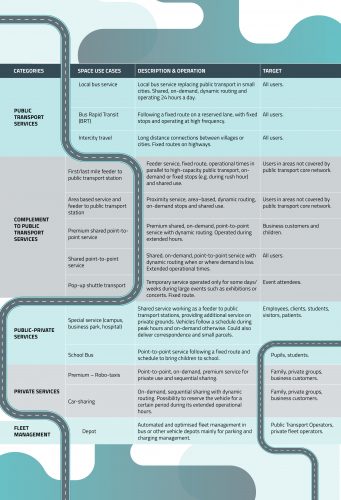
Table 1: 13 relevant use cases for AV integrated deployment, as defined in SPACE.
SPACE has also contributed to shaping the roadmap for integrated AVs, delivering a harmonised framework and reference architecture for AV deployment, while validating the importance of public transport and the common preference towards shared automated services with wide stakeholder consultation4.
SHOW: The largest initiative on AV piloting
January 2020 saw the launch of SHOW (SHared automation Operating models for Worldwide adoption)5, a four-year pan-European initiative that builds upon the SPACE legacy, allowing UITP – as the project coordinator – to keep implementing its vision. With around 70 partners and a €36 million budget (of which 83 per cent is being co-funded by the European Commission (EC)), SHOW is one of the all‑time largest and most holistic initiatives ever implemented that is piloting automated vehicles in urban environments, and is the current flagship reference on integrated AV piloting.
SHOW focuses on real-life urban demonstrations across the European Union (EU), seeing the integration of fleets of automated vehicles in public transport, demand-responsive transport (DRT), Mobility-as-a-Service (MaaS) and Logistics-as-a-Service (LaaS) schemes in 20 cities from 13 different EU countries. SHOW keeps exploring the potential added value and feasibility of the SPACE Use Cases; a dedicated matrix mapping our SHOW use cases versus the different EU sites can be reviewed in a publication released at the end of 20206.
Three challenges addressed in SHOW and a few lessons learnt
SHOW aims to define a tipping point in the AV deployment timeline, becoming a reference for future follow-up pilots and projects. To this extent, the SHOW project is working to answer some of the main key challenges revolving around AVs.
First, to measure and quantify the AV contribution to the objectives of sustainable mobility planning. To do so, SHOW will assess AV impact through real-life demonstrations and city-level simulations, helping to evaluate citizens’ attitudes/choices regarding AVs and analysing the overall impact in the urban modal split.
Secondly, the issue of feasibility. Safety and security risks have restricted AVs’ urban use to dedicated lanes and low speeds, strongly diminishing their usefulness and efficiency, while hindering user acceptance. SHOW is working on improving the necessary vehicle functionalities – adapting them to the local infrastructure, weather and traffic conditions – to avert these barriers.
Finally, the question of who will pay for it remains open, ignoring which business models enable feasible AV deployment. AV shuttles are still expensive and become obsolete faster than normal buses (sensor and software updates lead to six-year vehicle lifetimes), and their market deployment requires several investments from cities, both in infrastructure and regulations (leading to high CAPEX and OPEX costs). To guarantee sustainable deployment, SHOW is working on defining and testing different business models and exploitable results, identifying priority urban automated mobility use cases that guarantee high user acceptance, true user demand and cost-efficiency under realistic operation conditions, while ensuring that they are scalable and transferable.

Credit: UITP
So far, based on existing pilots and past projects, a few lessons arise, pointing towards higher relative relevance of policy and users’ acceptance rather than technology readiness. Overall, the speed and size of AVs should always be based on the demand, local needs and context, rather than technological developments. The vehicle, infrastructure and necessary regulatory adaptations can take longer and be more costly than expected (one to three years, and €100,000 to €600,000), impacting financial sustainability; new OEMs lack expertise for certified manufacturing processes.
In general, the decisive factors that seem to enable the efficient integration of AVs are the shared usage of AVs in fleets and the use of fully driverless operations. The positive impacts of AV deployments seem to be correlated with high degrees of integration with public transport and working in a cooperative decision-making framework. On the other hand, AV deployment in public transport would hardly be viable if regulation does not allow for drivers to be removed from the vehicle. However, public transport service quality largely depends on the bus driver (passenger interaction, ensuring safety and cleanness, coping with incidents): this means that we need to provide solutions for the driver services.
An open invitation to jointly define the integrated vision of tomorrow’s sustainable mobility
UITP and Bax & Company, together with the entire SHOW consortium, are working to make seamless and integrated urban mobility through automated fleets (public transport, DRT, LaaS, MaaS) a reality of tomorrow and not of the next decades. We invite all stakeholders that are active in the automated mobility community to join us in this journey, collaborating through the SHOW Stakeholders Forum7; this involves participating in our events and workshops and contributing to defining the key business models, roadmaps and policy actions needed. AVs may be just around the corner, but they will remain there until cities, authorities and operators proactively invite them for a sustainable, feasible and efficient integration in the existing mobility network.
References
- UITP – Autonomous Vehicles: a potential game changer for urban mobility (2017)
- https://space.uitp.org/
- https://space.uitp.org/updates/news/mission-space-completed-project-draws-to-a-close
- https://cms.uitp.org/wp/wp-content/uploads/2021/10/Project-Brief-SPACE_OCT12021.pdf
- https://show-project.eu/
- https://show-project.eu/wp-content/uploads/2021/04/SHOW-WP01-D-UIP-002-02_-_SHOW_D1.2_SHOW_Use_Cases_SUBMITTED.pdf
- https://show-project.eu/stakeholder-forum/
Authors
Guido Di Pasquale – Deputy Director – Knowledge & Innovation and SPACE Coordinator, UITP
Henriette Cornet (PhD) – CCAM Senior Manager and SHOW Project Coordinator, UITP
Charlotte van Hek – Junior Communications Manager, UITP
Ignacio Magallón – Senior Consultant & Team Lead, Bax & Company
Albert Gragera (PhD) – Future Mobility Consultant, Bax & Company
Joan Estrada – Innovation Consultant, Bax & Company

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 875530.
Related topics
Connected & Autonomous Vehicles, Infrastructure & Urban Planning, Public Transport, Sustainable Urban Transport, Vehicle & Passenger Safety
Issue
Issue 4 2021
Related modes
Autonomous vehicles
Related organisations
Bax & Company, European Commission (EC), European Union (EU), International Association of Public Transport (UITP)
Related people
Albert Gragera, Charlotte van Hek, Guido Di Pasquale, Henriette Cornet, Ignacio Magallón, Joan Estrada




